
自动驾驶安全联合实验室成立于2016年,与国内外多个学术与产业伙伴一起,致力于桥接学术研究与产业实践,聚焦自动驾驶安全领域的核心挑战——从标准解读到工程落地,从理论方法到数据验证。
实验室的核心方法论是"场景驱动、数据驱动、标准对齐"。依托驭研科技建设的全球最大规模之一的航测自然驾驶数据集(750h+飞行时数、10.5M+轨迹),实验室构建了从场景提取、风险量化到安全标准落地的完整研究链条,覆盖ISO 21448(SOTIF)、ISO 26262(功能安全)和ISO 34502(场景框架)等核心标准。
实验室与国内外整车企业、零部件供应商、检测机构和标准化组织保持紧密合作,在 ISO、SAE、GB 等国际国家平台积极贡献,致力于让自动驾驶安全研究真正服务于产业需求。
The AD Safety Joint Lab was established in 2016, together with academic and industry partners both in China and abroad. The lab bridges academic research and industry practice, addressing core challenges in autonomous driving safety — from standards interpretation to engineering implementation, from theoretical methods to data-driven validation.
The lab's core methodology is scenario-driven, data-driven, and standards-aligned. Leveraging one of the world's largest aerial naturalistic driving datasets built by DRIVEResearch (750h+ flight hours, 10.5M+ trajectories), the lab has established a complete research pipeline from scenario extraction and risk quantification to safety standard implementation, covering ISO 21448 (SOTIF), ISO 26262 (Functional Safety), and ISO 34502 (Scenario Framework).
The lab maintains close collaborations with OEMs, suppliers, testing agencies, and standardization bodies worldwide, actively contributing through ISO, SAE, GB and other international and national platforms, with the mission of making AD safety research truly serve industry needs.
研究方向 Research Directions
- 智能运载工具安全系统工程
- 智能汽车功能安全及预期功能安全
- 自动驾驶汽车多维驾乘性能(安全-高效-舒适)
- 中国驾驶员基础模型(DFM)构建
- 通用移动物理AI整机安全系统工程
- Safety Systems Engineering for Intelligent Vehicles
- Functional Safety & SOTIF for Intelligent Vehicles
- Multi-dimensional Driving Performance (Safety-Efficiency-Comfort)
- Chinese Driver Foundation Model (DFM)
- Safety Systems Engineering for General-purpose Mobile Physical AI
开源项目与数据集 Open-Source Projects & Datasets
开源数据集Open Datasets
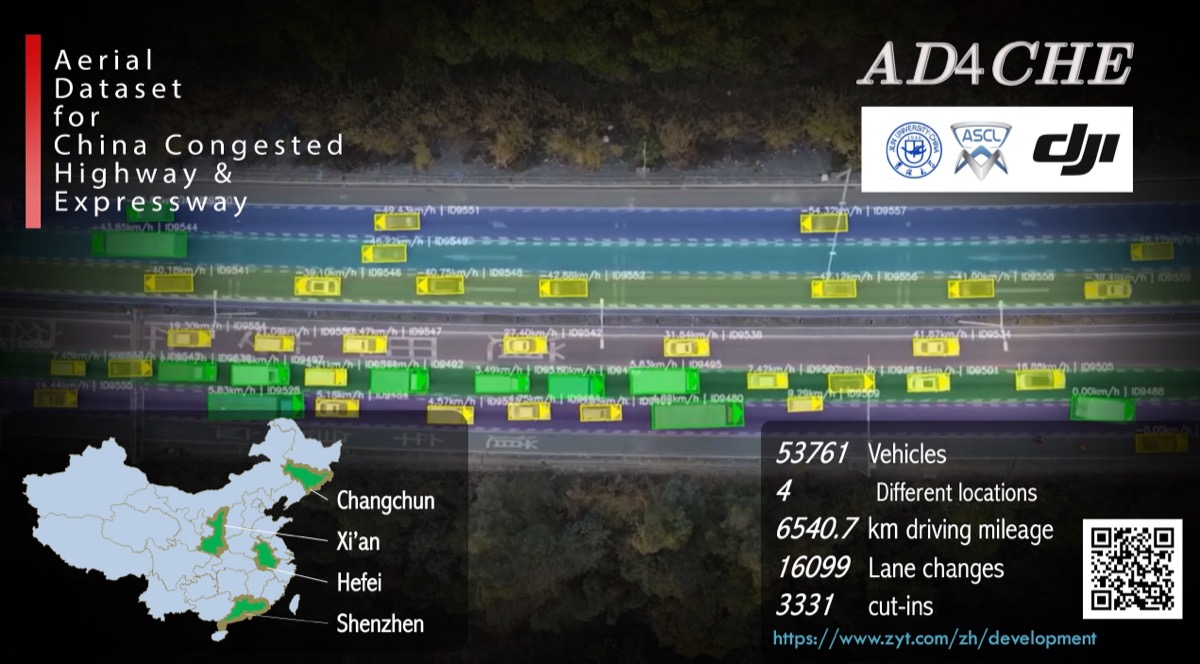
AD4CHE
400+机构申请使用 institutions applied高速公路与快速路拥堵场景,包含丰富的跟车与换道交互行为数据。Congested highway scenarios with car-following and lane-change interactions.

VRUD
弱势道路使用者VRU Interaction车辆-弱势道路使用者交互数据集,含13,418条轨迹,87%为VRU,4,000+交互场景。Vehicle-VRU interaction dataset, 13,418 trajectories, 87% VRU, 4,000+ interaction scenarios.

SinD
信号交叉口Signalized Intersection信号灯控制交叉口的机动车、行人、骑行者轨迹数据,含信号相位信息。Vehicle, pedestrian, cyclist trajectories at signalized intersections with signal phase info.
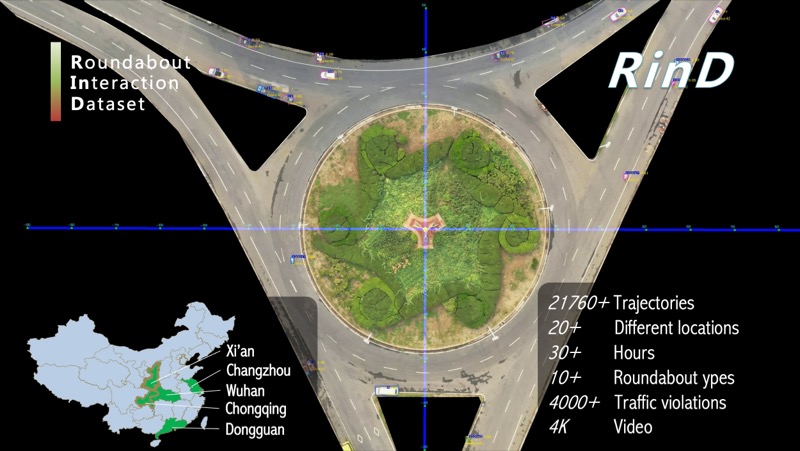
RinD
环岛交互Roundabout覆盖5个城市20+地点的环岛轨迹数据,含21,760+条轨迹和4,000+交通违规行为。Roundabout trajectories from 5 cities, 21,760+ trajectories, 4,000+ violations.
开源工具与项目Open-Source Tools & Projects
OpenTopic
把研究思路开源——可直接上手的开放研究话题,背后接 DRIVEResearch 航测数据(首发:商用车 vs 乘用车驾驶行为差异)Open-sourcing research agendas — ready-to-use open research topics backed by DRIVEResearch aerial data (first: commercial vs passenger driving behavior)
autozyx.com/opentopic →OpenODC
自动驾驶系统运行设计条件开源平台(基于 GB/T 45312—2025)Open Platform for ADS Operational Design Conditions (GB/T 45312-2025)
openodc.autozyx.com →AD Standards Tracker
自动驾驶标准与法规追踪(UN/中国/美国/欧盟/英国/日本/韩国)AD Regulations & Standards Tracker (UN/CN/US/EU/UK/JP/KR)
standards.autozyx.com →ADSafetyPilot
智能驾驶安全开发助手(安全知识 + 中国标准 + 真实数据)AI-Powered AD Safety Engineering Copilot
adsafetypilot.autozyx.com →ROAM
L4 自动驾驶远程运营与异常管理开源框架Open-Source Framework for L4 AD Remote Operations & Anomaly Management
roam.autozyx.com →Co4Pilot
4P框架(People / Project / Paper / Patent)4P Framework for Academic Research
co4pilot.autozyx.com →Automotive Development Agents
汽车工程智能体工具包(AD 安全 / SOTIF / 中国标准 / 工程证据链)Automotive engineering agent toolkit for AD safety, SOTIF, China standards, and engineering evidence workflows
autozyx.com/automotive-development-agents →SysArchPilot
系统架构智能助手(需求输入 / 知识资产 / 候选架构 / 规则评价 / 证据报告)System architecture copilot for requirements, knowledge assets, candidate architectures, rule evaluation, and evidence reports
autozyx.github.io/SysArchPilot →开源课程材料Open Course Materials
复杂系统工程Complex Systems Engineering
吉林大学汽车工程学院饶斌班课程JLU Automotive Engineering, Raobin Honors Program
课程详情 →Course Details →自动驾驶汽车功能安全Functional Safety for AD Vehicles
吉林大学汽车工程学院研究生课JLU Automotive Engineering, Graduate Course
课程专辑 →Course Album →团队 People
团队教师Faculty
合作伙伴Partner Faculty
赫瑞瓦特大学 AD Safety / Trustworthy AI
Heriot-Watt University
杜伦大学 Responsible AI / Computer Vision
Durham University
吉林大学 Chassis Dynamics & Control
Jilin University
中国农业大学 Smart Agri-Machinery Reliability
China Agricultural Univ.
吉林大学 AD for Engineering Vehicles
Jilin University
重庆大学 AD Simulation / SOTIF
Chongqing University
同济大学 LLM for AD / Agent Collaboration
Tongji University
在读学生Current Students
已毕业成员Alumni
合作方 Collaborations
代表性成果 Selected Publications
- 1. 2025 Yu, R., Wang, C., Zhang, Y., & Zhao, F. "Decomposition and Quantification of SOTIF Requirements for Perception Systems of Autonomous Vehicles." IEEE Transactions on Intelligent Transportation Systems.
- 2. 2025 Chen, C., Chen, L., Zhou, L., He, J., Xu, C., Chen, W., ... & Zhang, Y. "Study on the SOTIF of the Intelligent Heavy-Duty Truck Localization Module." Mechanical Systems and Signal Processing, 232, 112719.
- 3. 2025 Wang, Z., Kou, H., Lv, Z., Zhang, Y., Guo, Z., & Wang, C. "A Comprehensive Review of Drone-Based Autonomous Driving Datasets: Methodology, Taxonomy, and Prospects." IEEE Transactions on Intelligent Transportation Systems.
- 4. 2026 Kou, H., Wang, Z., Lv, Z., Wang, C., Guo, Z., & Zhang, Y. "Lane Detection for Autonomous Driving: A Comprehensive Review." Neurocomputing, 132864.
- 5. 2024 Wang, C., Guo, F., Yu, R., Wang, L., Zhang, Y. "The Application of Driver Models in the Safety Assessment of Autonomous Vehicles: Perspectives, Insights, Prospects." IEEE Transactions on Intelligent Vehicles, 9(1): 2364-2381.
- 6. 2024 Wang, C., Guo, F., Zhao, S., Zhu, Z., Zhang, Y. "Safety Assessment for Autonomous Vehicles: A Reference Driver Model for Highway Merging Scenarios." Accident Analysis & Prevention, 206.
- 7. 2023 Zhang, Y., Wang, C., Yu, R., et al. "The AD4CHE Dataset and Its Application in Typical Congestion Scenarios of Traffic Jam Pilot Systems." IEEE Transactions on Intelligent Vehicles, 8(5): 3312-3323.